
Autonomous robot holds its own against professional table tennis players
Sony has developed an autonomous robotic arm capable of competing with professional table tennis players.
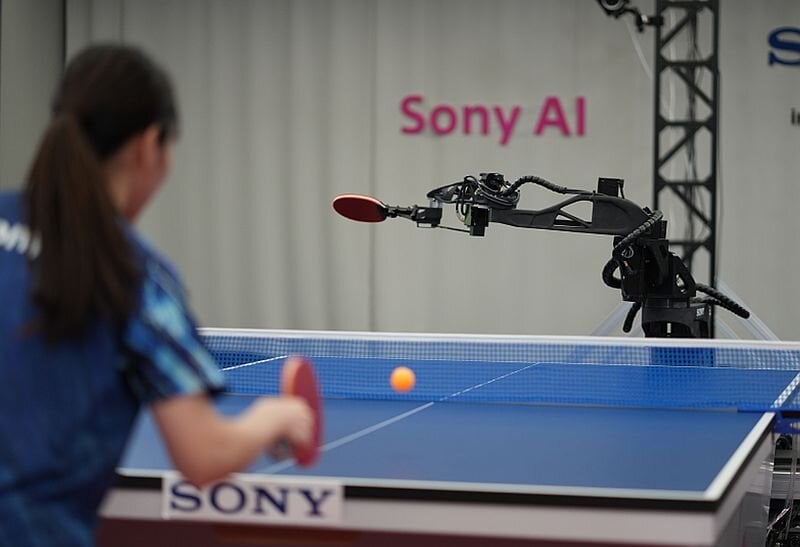
Since 1983 and the first “robot ping-pong” competition, table tennis has represented a major challenge for autonomous systems. The sport requires millisecond-level responsiveness, real-time adaptation to unpredictable human interactions, and precise control of trajectories and spin. Sony AI announced that it had met this challenge with the Ace project, whose results, published on the cover of Nature, demonstrate for the first time a robotic system’s ability to defeat a professional player in a dynamic and competitive environment.
The objective of the project was to prove that a physical AI could match, or even surpass, human experts in a complex task requiring perception, dynamic control and agility.
Technical constraints
Table tennis imposes specific constraints on autonomous robotic systems. The ball reaches linear speeds exceeding 20 m/s (72 km/h) and spin rates exceeding 160 revolutions per second (9,000 rpm). These parameters make its trajectory highly unpredictable, requiring almost instantaneous detection and reaction. Professional players adjust their shots according to spin, speed and ball position with millimetre-level precision. An error of only a few degrees or milliseconds can mean losing the point. Unlike a simulated environment, a human opponent adapts strategy in real time, introducing gameplay variations (topspin, backspin, smashes) that require constant AI adaptability.
Technical solutions implemented
To overcome these challenges, Sony AI developed an architecture combining advanced perception capabilities, reinforcement learning and agile robotics.
To master the speed of professional gameplay, Ace uses a control strategy trained through deep reinforcement learning (RL) within a realistic physics simulation. This Sim2Real approach involves training the agent on synthetic data initialised from recordings of human matches, enabling it to acquire complex control behaviours before physical deployment.
Ace uses 12 high-speed sensors to track the ball accurately:
• Three IMX636 event-based vision sensors (EVS) (developed with Prophesee): These asynchronous sensors record only changes in brightness at pixel level, reducing latency to less than one millisecond. They enable detection of spin (up to 9,000 rpm) and complex ball trajectories.
• Nine Pregius™ IMX273 active sensors (200 Hz): These provide high-resolution images for adapted 3D triangulation to estimate ball position and speed with a total latency of 10.2 ms.
This combination enables Ace to predict trajectories with sufficient accuracy to anticipate shots, even during high-speed rallies.
Ace relies on a deep reinforcement learning algorithm to adapt its strategy in real time according to the observed trajectory and spin, continuously recalculate the optimal striking trajectory while accounting for aerodynamic disturbances and spin effects applied to the ball, and generate varied shots (topspin, slice, block) with precision comparable to that of a professional player.
Unlike traditional systems based on predefined scripts, Ace learns through experience, adjusting its movements according to real-time feedback, much like a human player.
The Ace robot was designed to reproduce the fast and precise movements of a table tennis player. It features eight axes of movement (two prismatic and six rotary) enabling rapid lateral movement and optimal striking precision. Its end effector is equipped with a paddle and a gripping system for one-handed serves. Its mechanical architecture has been optimised to withstand the forces generated by balls travelling at 19.6 m/s (70 km/h), while maintaining sufficient stability for prolonged rallies.

To match the speed of professional athletes, the robot features two prismatic joints and six rotary joints optimised for rapid lateral movement and striking precision, as well as an end effector equipped with a paddle and a cup containing the ball for serves.
Results achieved
During tests conducted under the official rules of the International Table Tennis Federation (ITTF), Ace defeated several elite-level players, including a professional player for the first time. The system maintained competitive rallies against human opponents, returning balls at 19.6 m/s and dynamically adapting to opposing strategies. According to Sony, the combination of hybrid vision technologies, reinforcement learning and agile robotics enabled Ace to surpass previous limits of autonomous robotic systems in terms of perception, control and responsiveness. These results demonstrate that an autonomous robotic system can compete with humans in complex and dynamic tasks.
Potential applications for industrial robots
The technologies developed for Ace could be leveraged within the industrial robotics sector, particularly in environments where precision, speed and adaptability are indispensable.
1. Handling fast-moving objects
◦ EVS and APS sensors could be used to track and grasp components on high-speed production lines, such as in the automotive or electronics sectors.
◦ The trajectory prediction algorithm could anticipate the movement of falling or moving objects, improving the efficiency of sorting or assembly robots.
2. Real-time human-robot collaboration (cobotics)
◦ Low latency (10.2 ms) and human motion detection pave the way for cobots capable of reacting instantly to an operator’s actions without collision risks.
◦ Possible applications include maintenance assistance, precision assembly or the handling of hazardous tools.
3. Dynamic control in unpredictable environments
◦ Reinforcement learning could be applied to robots required to adapt to process variations (e.g. component defects, task changes).
◦ Examples include welding robots adjusting their trajectories according to material imperfections, or industrial drones navigating dynamic warehouses.
4. Energy and mechanical optimisation
◦ Ace’s lightweight and agile design could inspire more compact and energy-efficient industrial robots, reducing operating costs while increasing productivity.
◦ Fast and precise actuators could be integrated into robotic arms for tasks requiring human-like dexterity, such as the assembly of miniature components.
Published by Youssef Belgnaoui, editor for Induportals.
