
www.ptreview.co.uk
27
'26
Written on Modified on
FANUC Strengthens Collaboration with NVIDIA
FANUC has further enhanced the integration between NVIDIA’s open robot simulation framework, NVIDIA Isaac Sim, and its own simulation software, ROBOGUIDE.
www.fanuc.eu
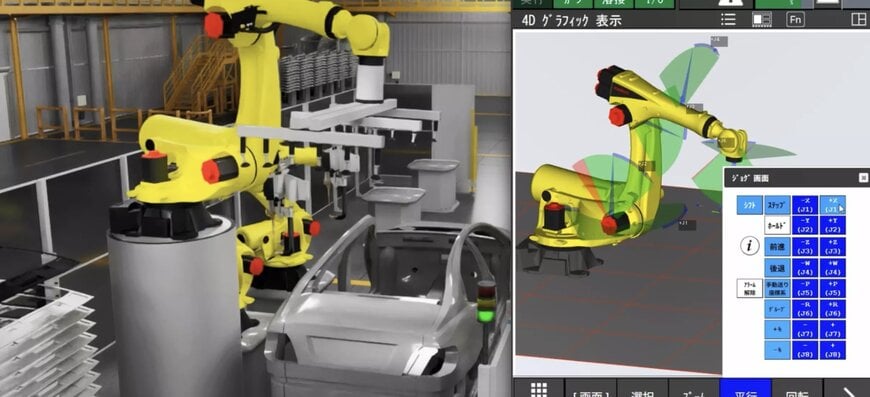
FANUC and NVIDIA are collaborating to integrate advanced simulation architectures and foundation models to enhance the accuracy of industrial robotic digital twins.
This cooperation addresses the operational challenge of eliminating the sim-to-real gap and automating highly variable manual tasks within manufacturing and assembly environments. By combining precise motion control software with GPU-accelerated physics engines and artificial intelligence models, the partners aim to transition industrial automation from rigid pre-programmed routines to adaptive physical AI systems.
Technical architecture and software integration
The primary solution centers on the bidirectional integration of NVIDIA Isaac Sim and FANUC ROBOGUIDE software suites. Under this technical framework, responsibilities are divided between the software layers based on distinct engineering functions:
- FANUC provides the core robot motion control algorithms, cycle-time calculators, virtual teach pendants, and 3D Vision system processing.
- NVIDIA delivers the Isaac Sim framework, the PhysX physics engine, the Isaac Lab learning environment, and the GR00T N robot foundation model.
The platform functions through two distinct operational modes. In the first configuration, Isaac Sim operates at the forefront to render physically accurate sensor environments, while ROBOGUIDE communicates continuously in the background to enforce identical trajectories and execution times as real machinery. In the second configuration, ROBOGUIDE drives the user interface while the NVIDIA PhysX engine handles real-time calculations for rigid-body dynamics, contact forces, and gravity modeling.
System functionality and operational logic
The system utilizes standardized digital interfaces to synchronize the parallel environments. When executing complex tasks like bin picking, randomly piled parts are simulated via physics-based modeling. FANUC’s 3D Vision system scans the virtual pile, identifies part coordinates, and routes pick-and-place trajectories through the background physics engine to verify that the robotic arm avoids self-collision or part slippage.
For flexible component handling, such as garment folding, the system bypasses conventional vision-based path compensation. Instead, it utilizes the NVIDIA GR00T N foundation model to process imitation learning data captured from human operators. FANUC's motion control technology smooths the resulting neural network outputs, translating them into fluid, continuous physical motor currents in real time.
Deployment and exhibition validation
The integrated technologies have been deployed across phased physical and virtual testing cycles. Initial validation occurred at the International Robot Exhibition in Tokyo, where technical teams verified path replication accuracy.
Subsequent architectural upgrades were completed ahead of FANUC’s New Product Open House Exhibition in May 2026. This deployment phase introduced a physical dual-arm CRX collaborative robot system configured with an updated edge computing infrastructure. The system replaces legacy hardware modules with the NVIDIA Jetson Thor platform utilizing the Jetson T5000 module, increasing local AI compute capability by more than 7.5 times to accelerate real-time human-robot collision avoidance loops.
Industrial applications and efficiency benefits
The targeted application areas span high-volume automotive assembly, electronics manufacturing, and logistics warehouse sorting. Concrete technical use cases include the simulation of flexible cable routing, high-precision component insertion, and automated bin picking under unstructured conditions.
By implementing this integrated digital infrastructure, facilities achieve higher process stability, safety, and maintainability. The technical reasoning for this deployment lies in the elimination of physical prototyping; by completing entire feasibility and virtual commissioning studies within a high-fidelity simulation loop, automation engineers can optimize cycle times and predict mechanical deviations prior to physical hardware installation on the factory floor.
Edited by Romila DSilva, Induportals Editor, with AI assistance.
System functionality and operational logic
The system utilizes standardized digital interfaces to synchronize the parallel environments. When executing complex tasks like bin picking, randomly piled parts are simulated via physics-based modeling. FANUC’s 3D Vision system scans the virtual pile, identifies part coordinates, and routes pick-and-place trajectories through the background physics engine to verify that the robotic arm avoids self-collision or part slippage.
For flexible component handling, such as garment folding, the system bypasses conventional vision-based path compensation. Instead, it utilizes the NVIDIA GR00T N foundation model to process imitation learning data captured from human operators. FANUC's motion control technology smooths the resulting neural network outputs, translating them into fluid, continuous physical motor currents in real time.
Deployment and exhibition validation
The integrated technologies have been deployed across phased physical and virtual testing cycles. Initial validation occurred at the International Robot Exhibition in Tokyo, where technical teams verified path replication accuracy.
Subsequent architectural upgrades were completed ahead of FANUC’s New Product Open House Exhibition in May 2026. This deployment phase introduced a physical dual-arm CRX collaborative robot system configured with an updated edge computing infrastructure. The system replaces legacy hardware modules with the NVIDIA Jetson Thor platform utilizing the Jetson T5000 module, increasing local AI compute capability by more than 7.5 times to accelerate real-time human-robot collision avoidance loops.
Industrial applications and efficiency benefits
The targeted application areas span high-volume automotive assembly, electronics manufacturing, and logistics warehouse sorting. Concrete technical use cases include the simulation of flexible cable routing, high-precision component insertion, and automated bin picking under unstructured conditions.
By implementing this integrated digital infrastructure, facilities achieve higher process stability, safety, and maintainability. The technical reasoning for this deployment lies in the elimination of physical prototyping; by completing entire feasibility and virtual commissioning studies within a high-fidelity simulation loop, automation engineers can optimize cycle times and predict mechanical deviations prior to physical hardware installation on the factory floor.
Edited by Romila DSilva, Induportals Editor, with AI assistance.
