
www.ptreview.co.uk
24
'26
Written on Modified on
Robotic Gripping Advancement Through Human Manipulation Data
ABB Robotics and PSYONIC are integrating advanced prosthetic components into collaborative robotic arms to improve autonomous mechanical dexterity.
global.abb
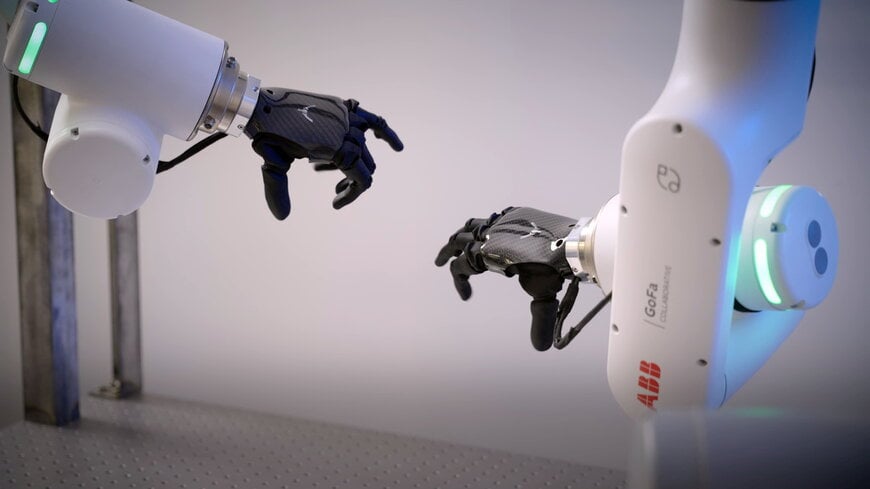
ABB Robotics is partnering with PSYONIC to address limitations in automated material handling. Traditional industrial grippers excel at rigid, repetitive movements but often fail when encountering fragile, deformable, or irregularly shaped objects. Replicating the sensory feedback and adaptive mechanics of human hands remains a significant challenge for industrial automation.
To bridge this gap, this cooperation combines PSYONIC's experience in bio-inspired electronics with ABB’s industrial digital infrastructure. The objective is to utilize real-world touch and motion data gathered from human prosthetic use to train autonomous robotic systems.
Technical Solution and Interface Integration
The technical solution integrates the PSYONIC Ability Hand as an end-of-arm tooling component on the ABB GoFa collaborative robot. The Ability Hand is a lightweight, multi-articulating bionic hand featuring embedded pressure sensors and a vibration feedback system. These sensors capture precise metrics regarding contact points, grip force, and release timing, while its flexible fingers conform mechanically to irregular shapes.
ABB's collaborative robot provides the positioning accuracy and repeatability required to execute these complex movements at an industrial grade. By utilizing identical hand hardware for both human amputees and industrial arms, the system captures high-fidelity data on movement and contact forces. This data is then transferred into the robot’s control architecture, allowing next-generation physical AI systems to learn variable tasks.
Applications and Industrial Use Cases
The combined system is being evaluated for applications across several sectors, including:
- Automotive and Aerospace: Assembly of flexible wiring harnesses and fragile components.
- Logistics and Packaging: Sorting, packing, and handling mixed-good inventories with unpredictable shapes.
- Life Sciences: Safe manipulation of delicate laboratory samples and chemical containers.
By executing tasks that are repetitive or ergonomically hazardous for human workers, this integration improves process stability, workplace safety, and operational flexibility. According to the International Federation of Robotics (IFR), advanced gripping technology and digital integration can reduce engineering time by up to 30%, increasing the return on investment for automated installations.
Implementation and R&D Integration
The development phase involves close cooperation between PSYONIC and the ABB Robotics research and development team. Engineering efforts focus on software integration, ensuring that the sensor data from the bionic hand maps directly to the robot's motion control algorithms. Testing focuses on how touch-enabled manipulation performs under dynamic, variable conditions, ensuring the system can scale reliably from laboratory environments to factory floors.
Edited by Evgeny Churilov, Induportals Media - Adapted by AI.
www.abb.com
Implementation and R&D Integration
The development phase involves close cooperation between PSYONIC and the ABB Robotics research and development team. Engineering efforts focus on software integration, ensuring that the sensor data from the bionic hand maps directly to the robot's motion control algorithms. Testing focuses on how touch-enabled manipulation performs under dynamic, variable conditions, ensuring the system can scale reliably from laboratory environments to factory floors.
Edited by Evgeny Churilov, Induportals Media - Adapted by AI.
www.abb.com
